Structural Design
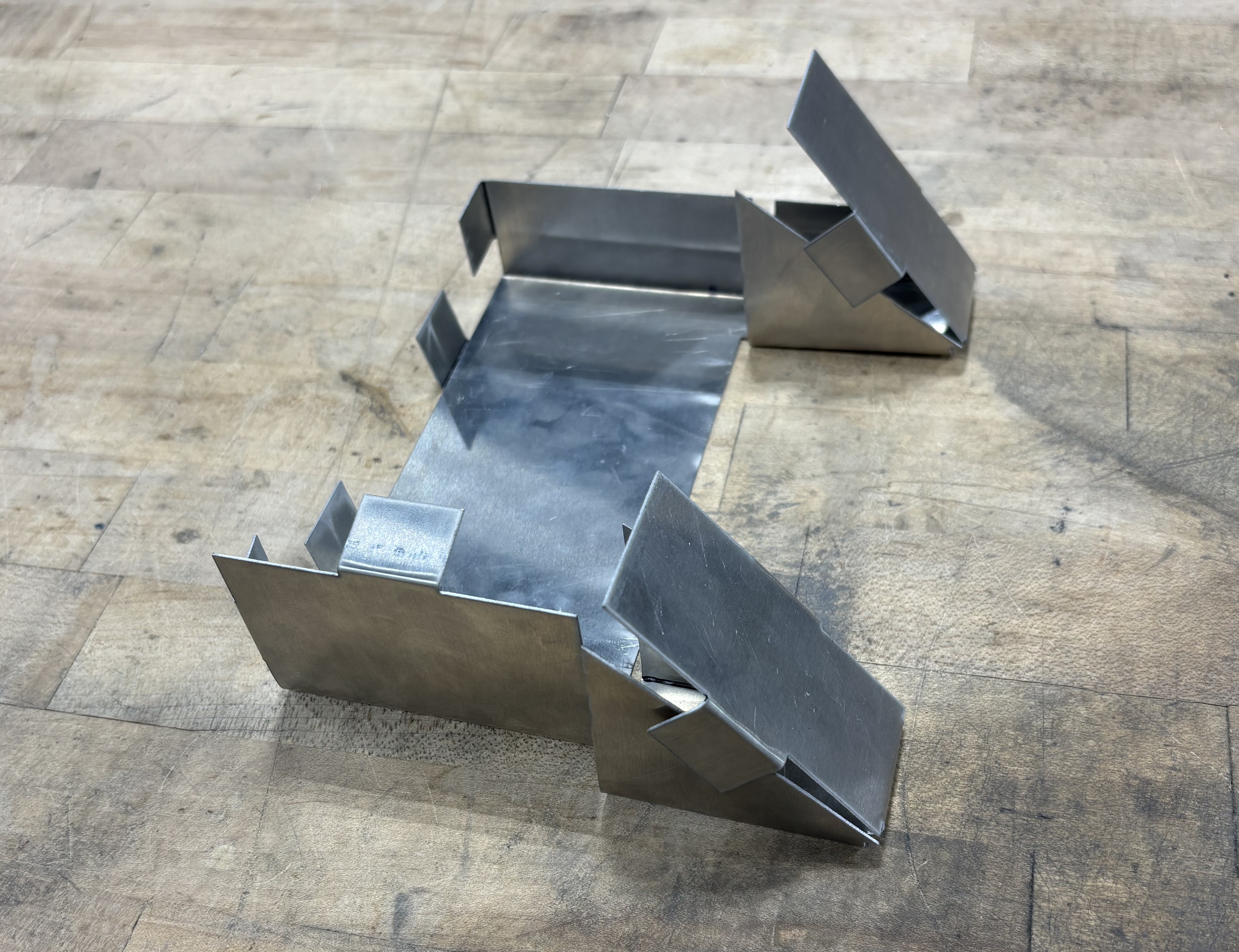
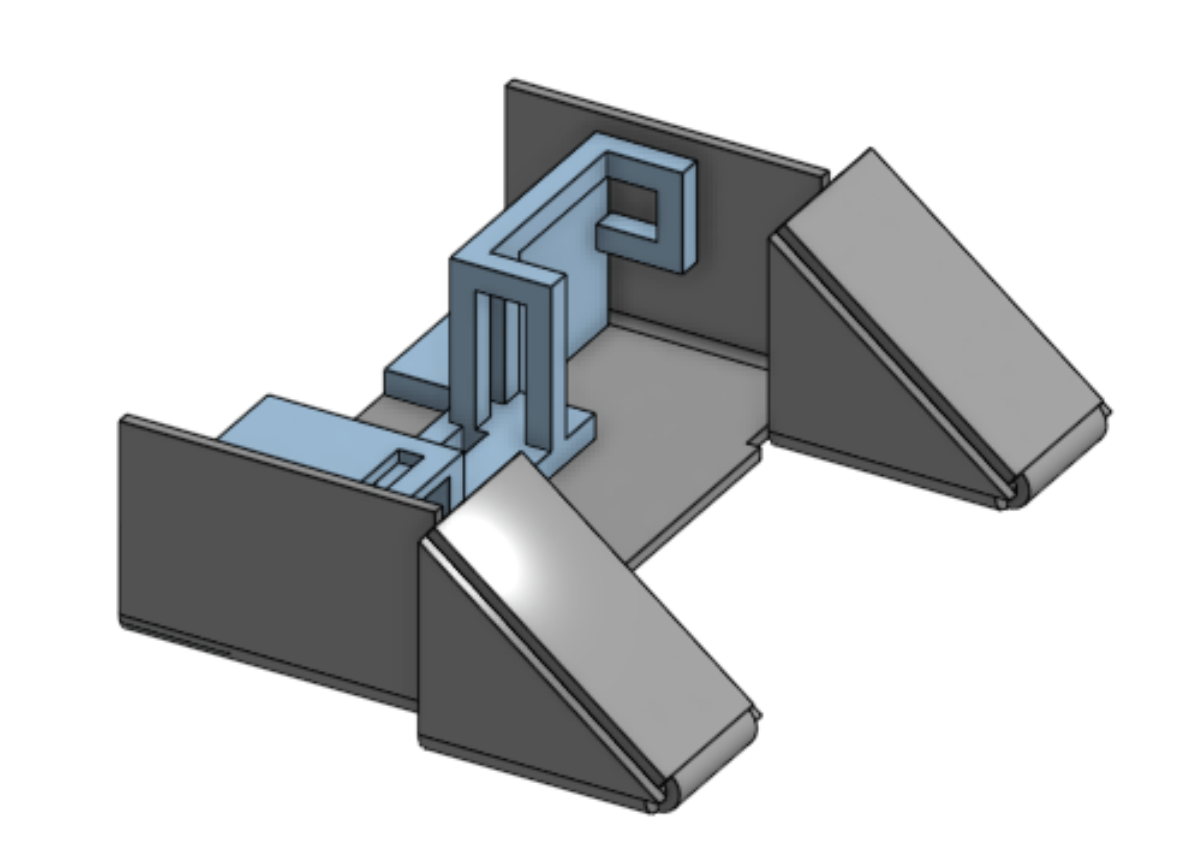
I designed a two-piece protective shell from 1/16-inch aluminum sheet metal to balance impact resistance and low weight. I used Onshape's sheet-metal tools to model bent geometry and generate flat patterns for waterjet cutting.
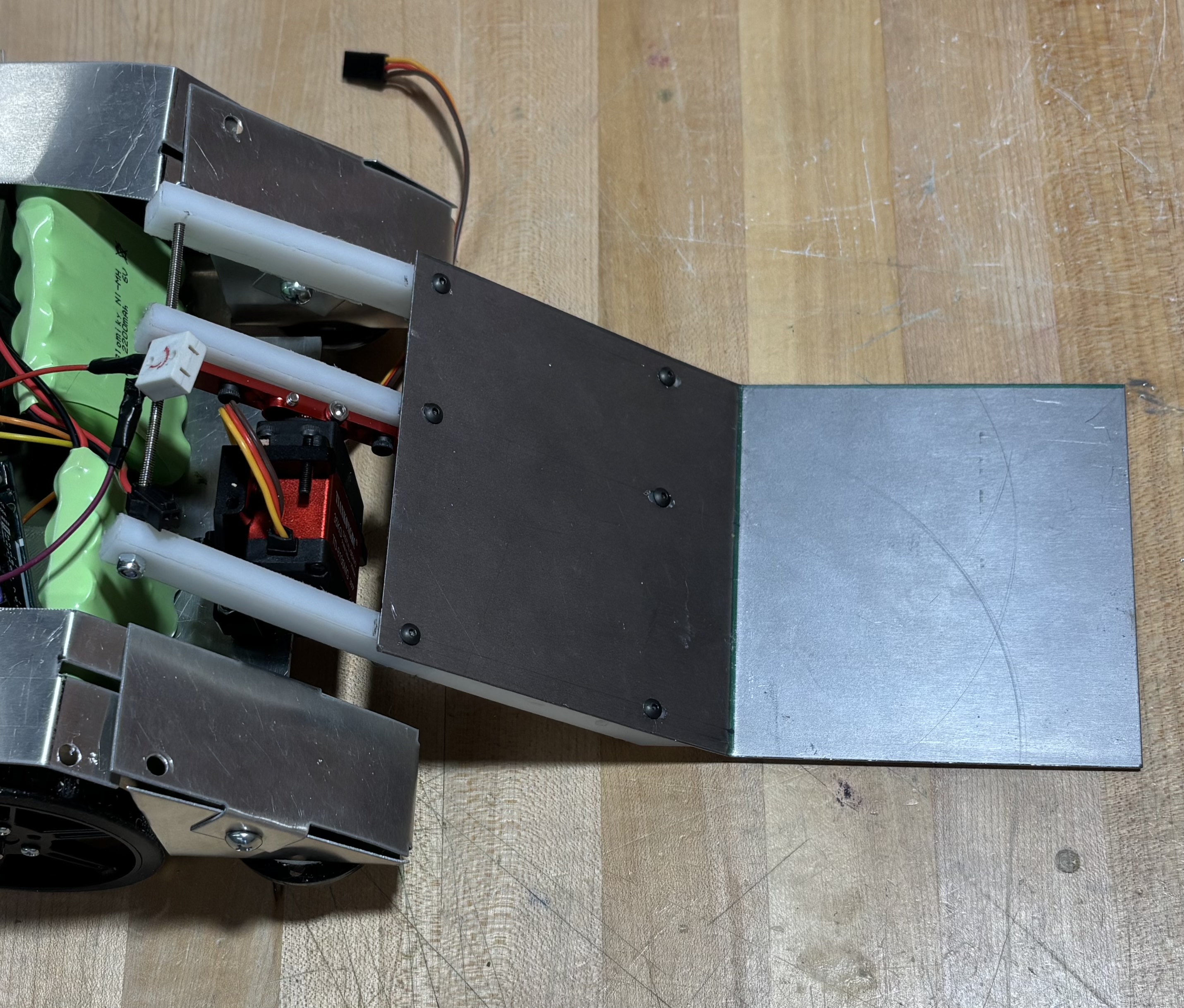
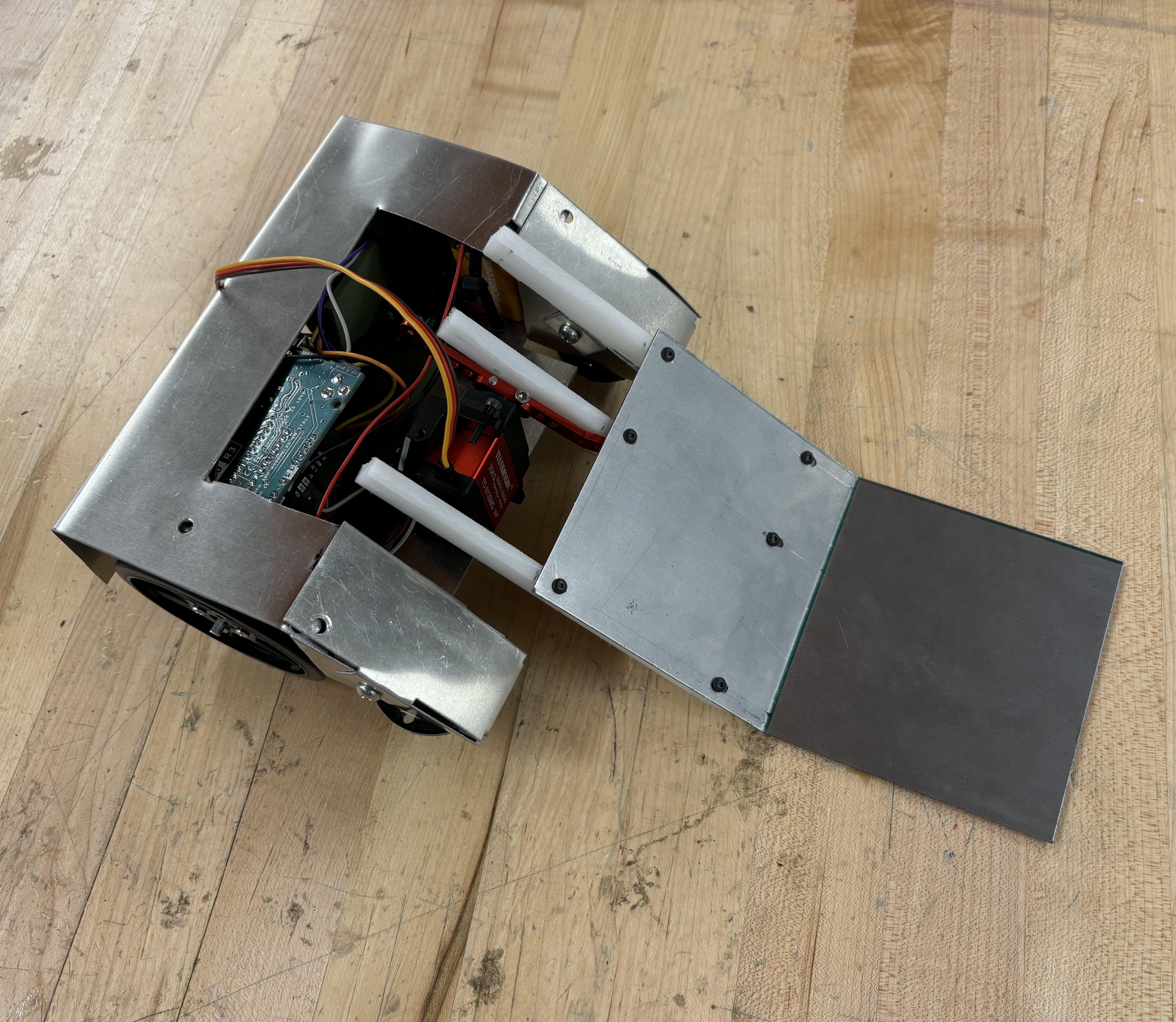
To allow fast repairs, I incorporated overlapping tabs and bolted joints so the shell could be quickly disassembled. I reinforced the base with an aluminum plate to prevent buckling from drivetrain loads and impacts, and I mounted the drive motors directly to the shell to reduce part count and improve stiffness.